

Работая над TenniRobo, мы часто общаемся со многими неординарными людьми, которые с радостью делятся своими знаниями и опытом. Совсем недавно нам посчастливилось познакомиться с очень интересным человеком, история которого может впечатлить и вас. Хотелось бы поделиться ею в этом блоге и, может, получить несколько комментариев.
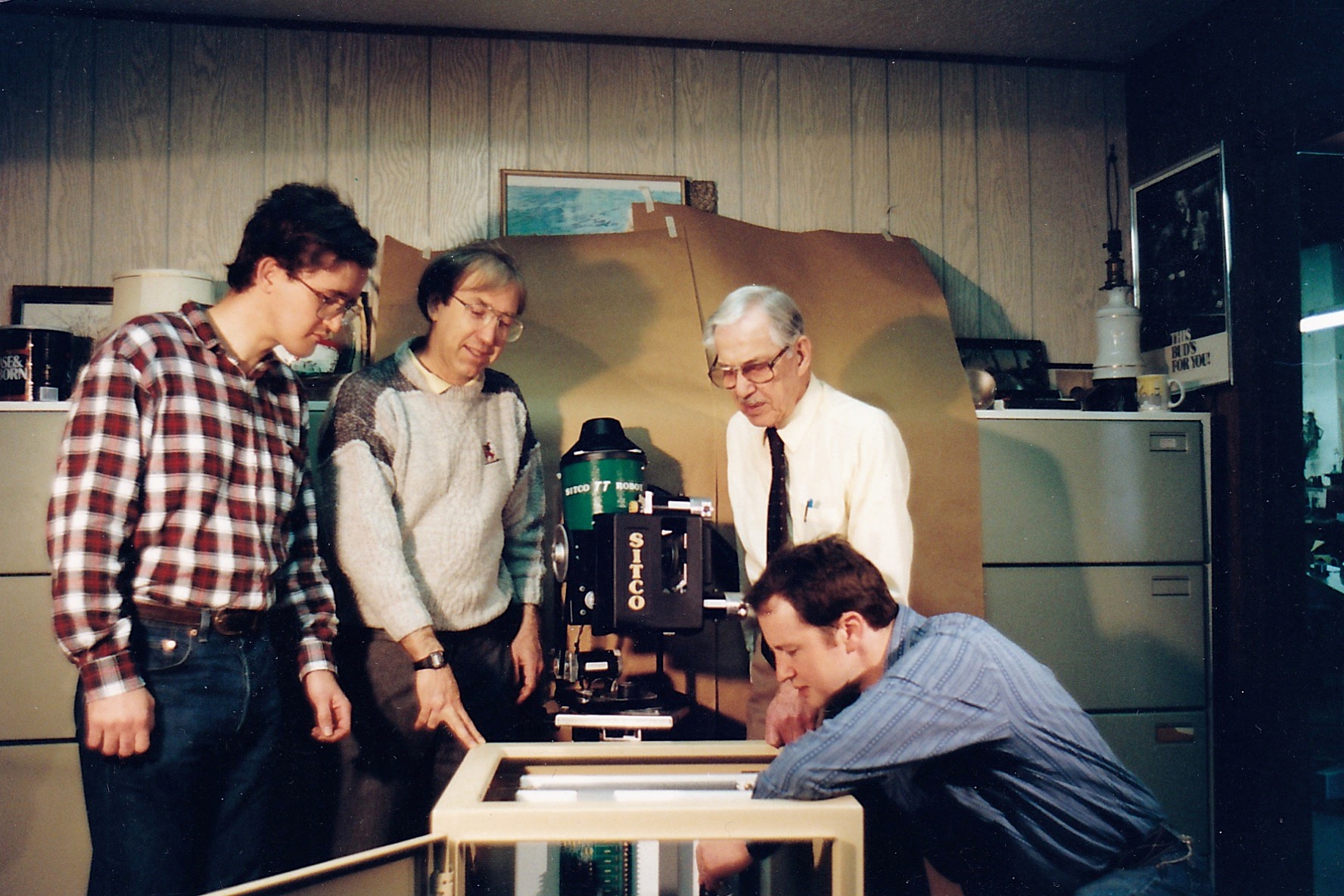
События, которым уже скоро исполнится 30 лет, возвращают нас к истокам создания программируемых роботов для настольного тенниса. Тогда, в 1992 году, Вакиди Фаликофф был одним из двух главных разработчиков проекта программируемого робота для настольного тенниса под рабочим названием T92-004-A-TT.
Одной из основных целей проекта была помощь в подготовке спортсменов США к Олимпийским играм 1992 года. На разработку прототипа было выделено всего пять месяцев, поэтому инженерам пришлось устанавливать самые мощные из доступных сервоприводы, шаговые двигатели и т. д. из-за чего общая масса сильно увеличилась. И когда это в свою очередь привело к дополнительной нагрузке на остальные компоненты конструкции, то пришлось улучшать и их. В конце концов, стабильная конфигурация всех элементов была достигнута в требуемый срок.
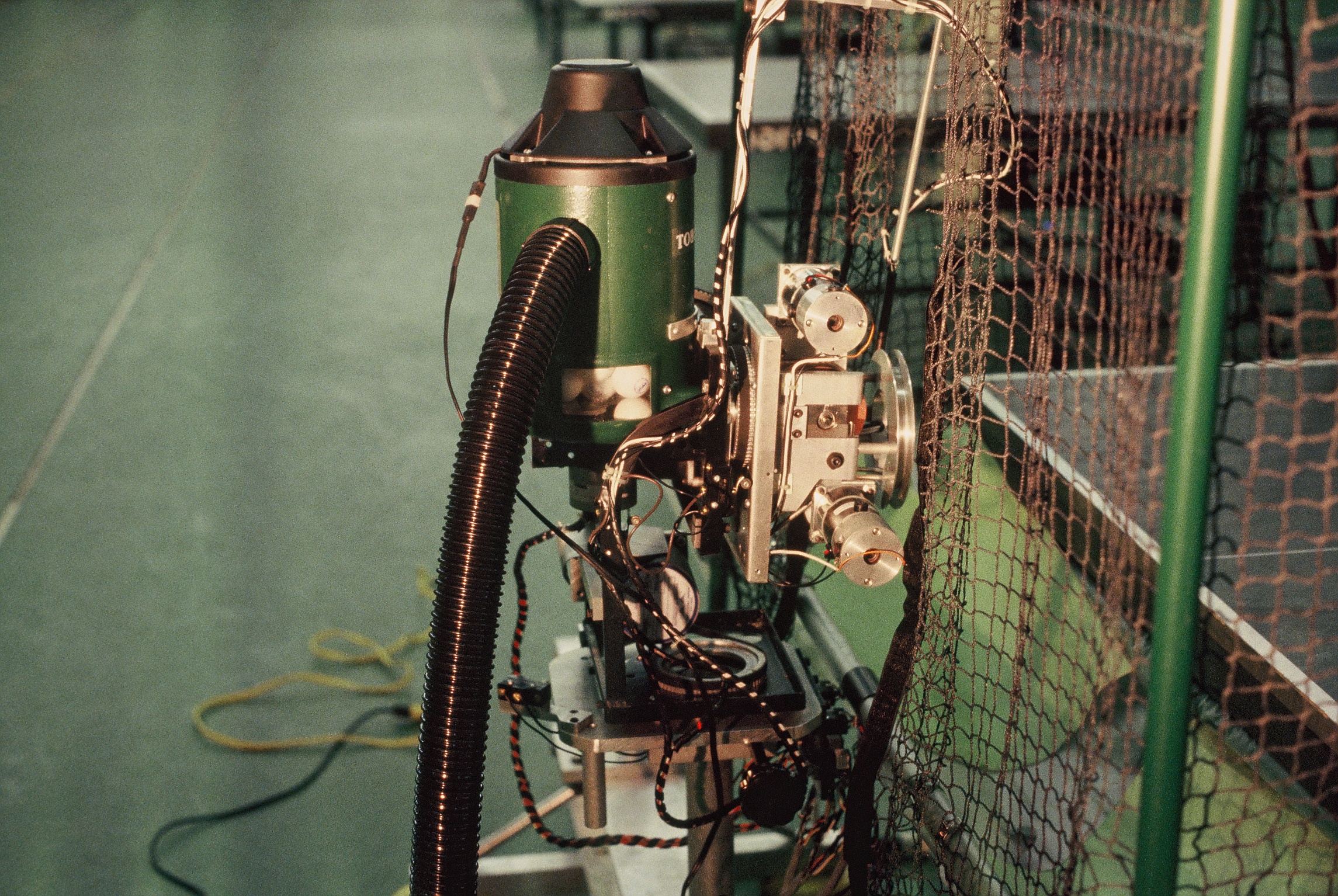
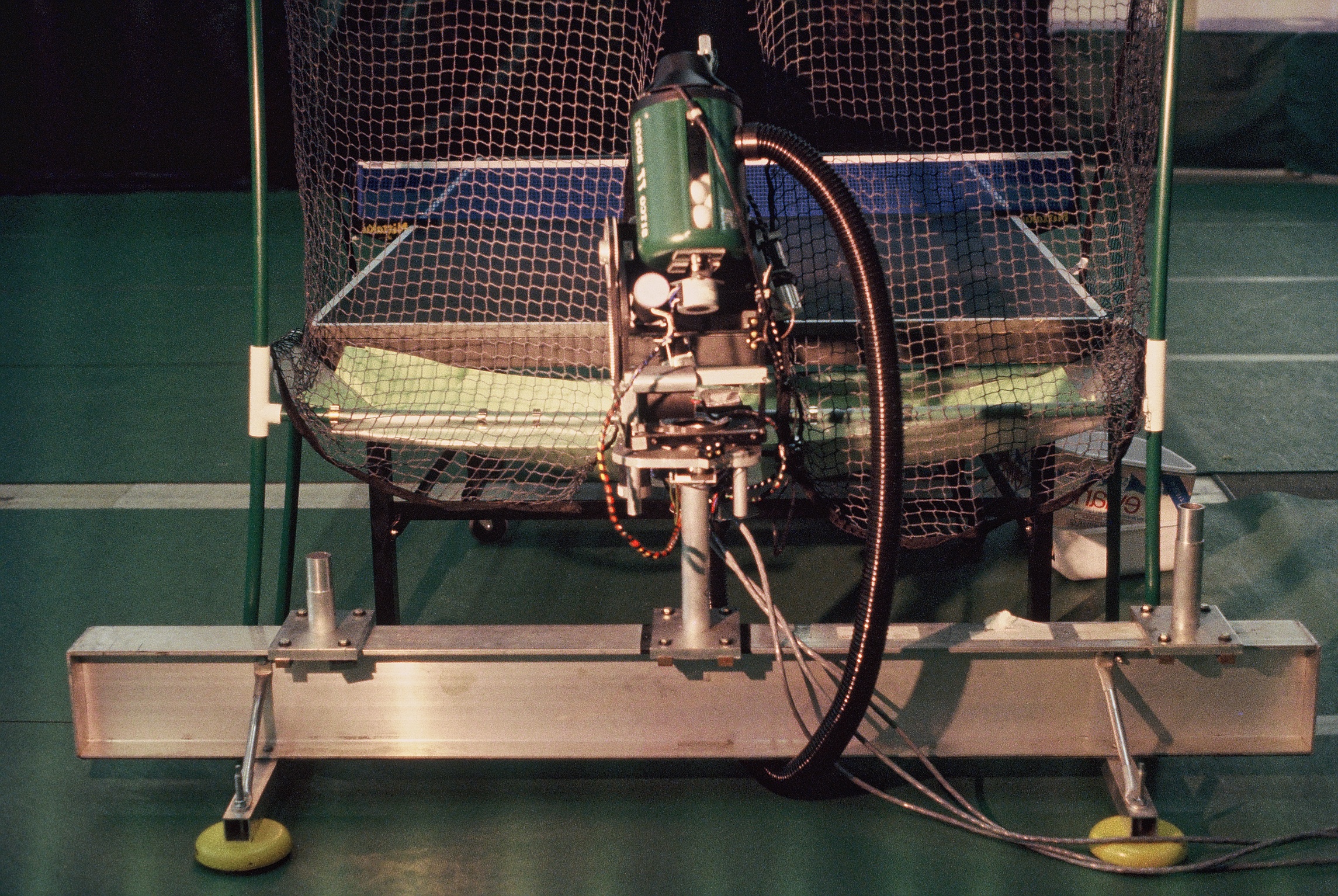
Прежде всего, большое значение имела безотказная работа механизма подачи мячей. Поэтому, разработчики не стали ломать голову и использовали модифицированную версию из старых, но проверенных временем, роботов SITCO.
Еще одной проблемой стала возможность поддержания стабильного интервала времени между подачами (мы в TenniRobo также смогли комплексно решить эту проблему лишь в последней ревизии робота — это очень непростая задача). Благодаря напряженной работе был достигнут показатель в более чем 150 мячей в минуту. При этом, самый короткий стабильный интервал между двумя любыми типами подач составил всего 0,5 секунды.

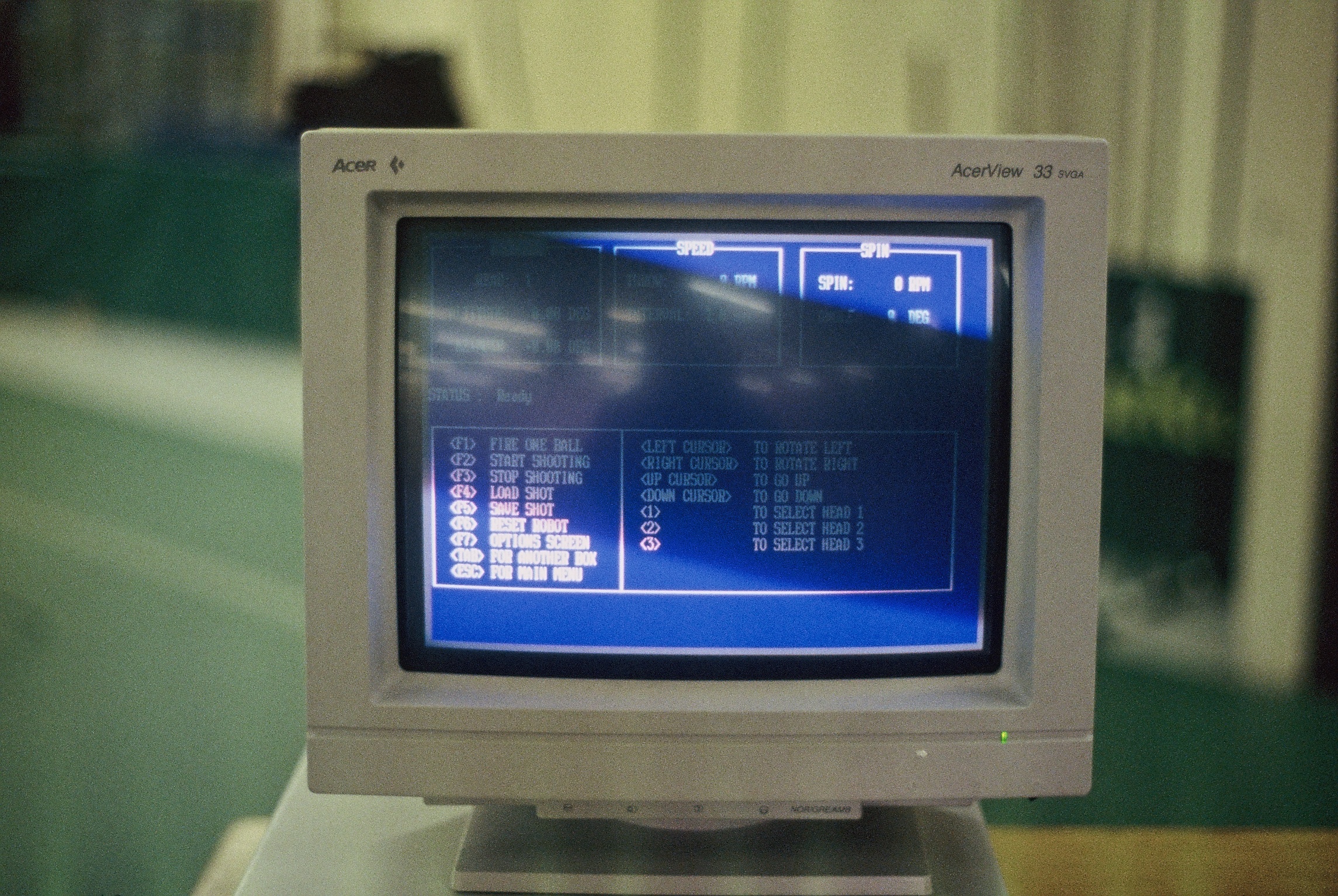
Даже сейчас, управляемый ПК робот из далекого 1992 года, по характеристикам не уступает самым современным, коммерчески доступным роботам для настольного тенниса. Некоторые же из его функций до сих пор недоступны, например, 3D-интерфейс, показывающий траекторию полета мячей.
Алгоритм прогнозирования траектории базировался на работах множества ученых в области аэродинамики, в частности исследованиях проведенных Исследовательским центром Эймса (NASA). Одним из открытий стала так называемая разрабочиками сила «Обратного Магнуса» (наш вольный перевод термина из документов, предоставленных нам для ознакомления), которая противоположна известной ранее силе Магнуса, отвечающей за искривление траектории мяча в воздухе.
Этот мало известный эффект возникает только при определенном соотношении вращения и скорости. Инженеры предположили, что именно обратная сила Магнуса вызывает внезапное падение мяча в некоторых подачах с обратным вращением, ближе к концу его полета. Для того чтобы учесть все изменения траектории, инженеры предусмотрели даже корректировку использования робота в зависимости от его высоты относительно уровня моря.
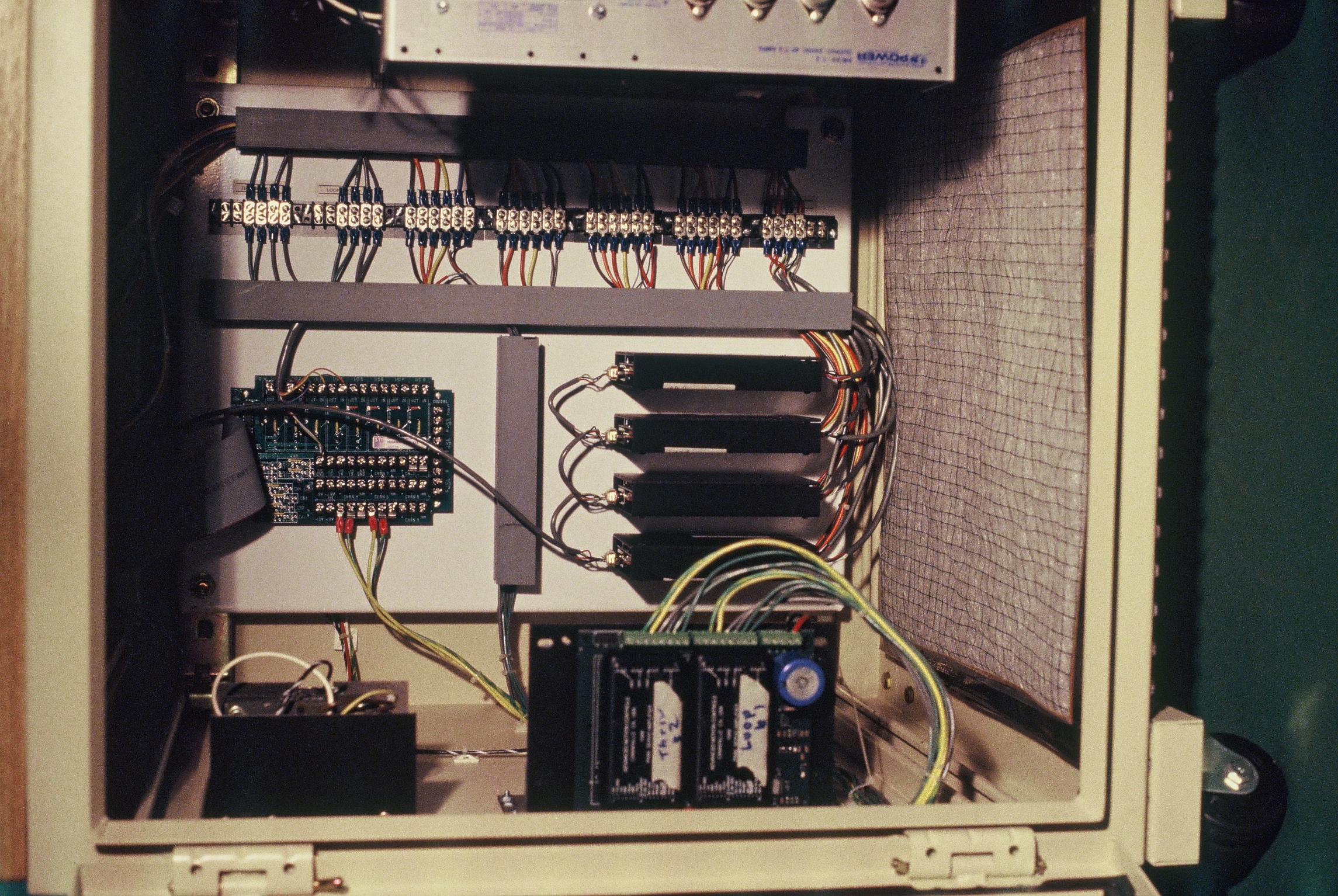
Количество выстрелов воспроизводимых роботом, а также их последовательностей, ограничивалось только размерами памяти жесткого диска компьютера ACER 486. Более того, программное обеспечение предусматривало работу с тремя роботами одновременно, которые могут быть добавлены пользователем по желанию. Однако, из-за нехватки времени, робот был произведен только в одном экземпляре.
Уже тогда использовалась система рециркуляции, состоящая из улавливающей мячи сетки и пневматического трубчатого механизма, который возвращал эти мячи в специальный сборник, для последующей их подачи к метательной головке.
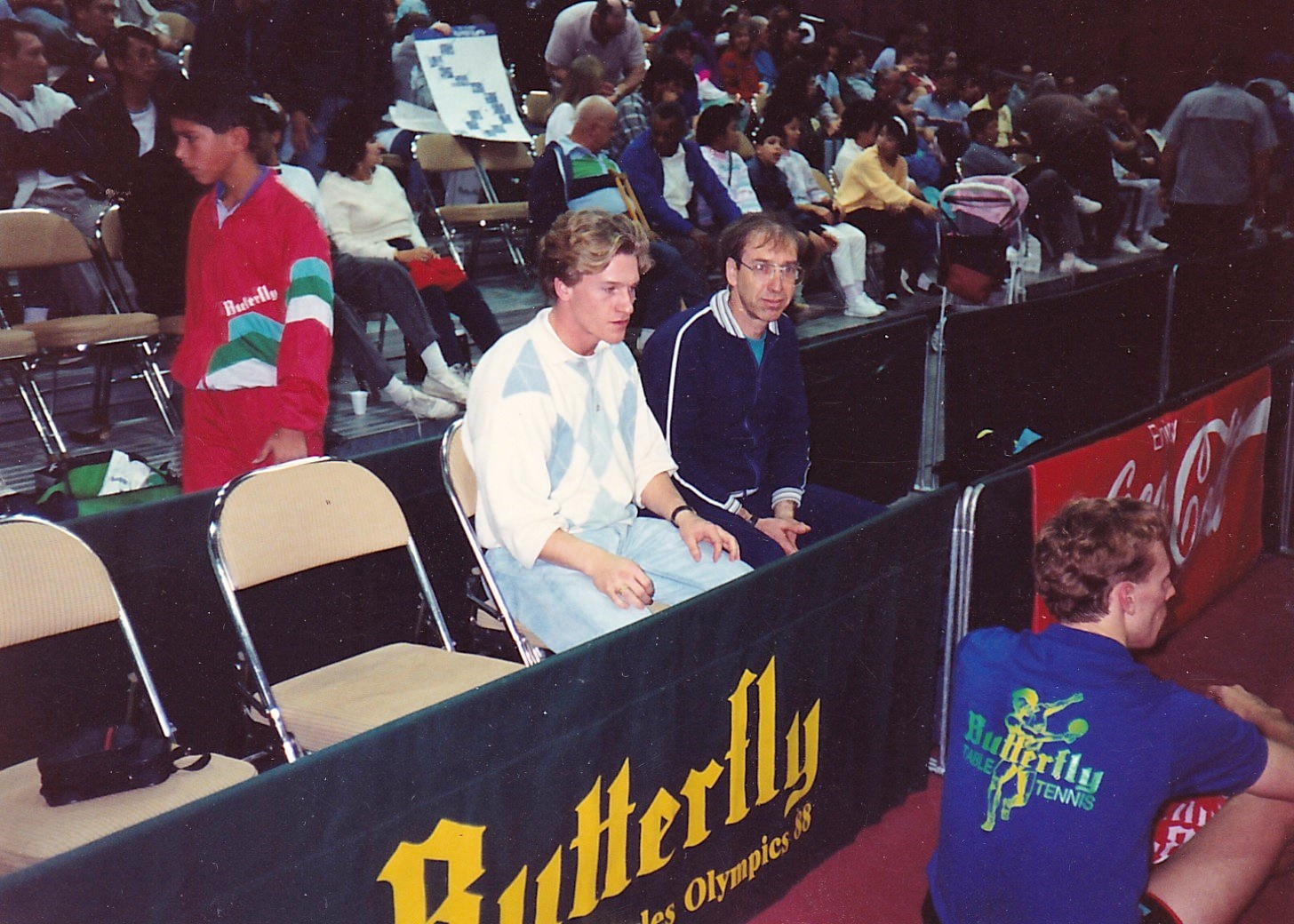
В качестве помощника тренера мужской олимпийской сборной США 92′ Вакиди использовал свое изобретение для тренировки двух лучших игроков сборной, Шона О’Нила и Джимми Батлера.
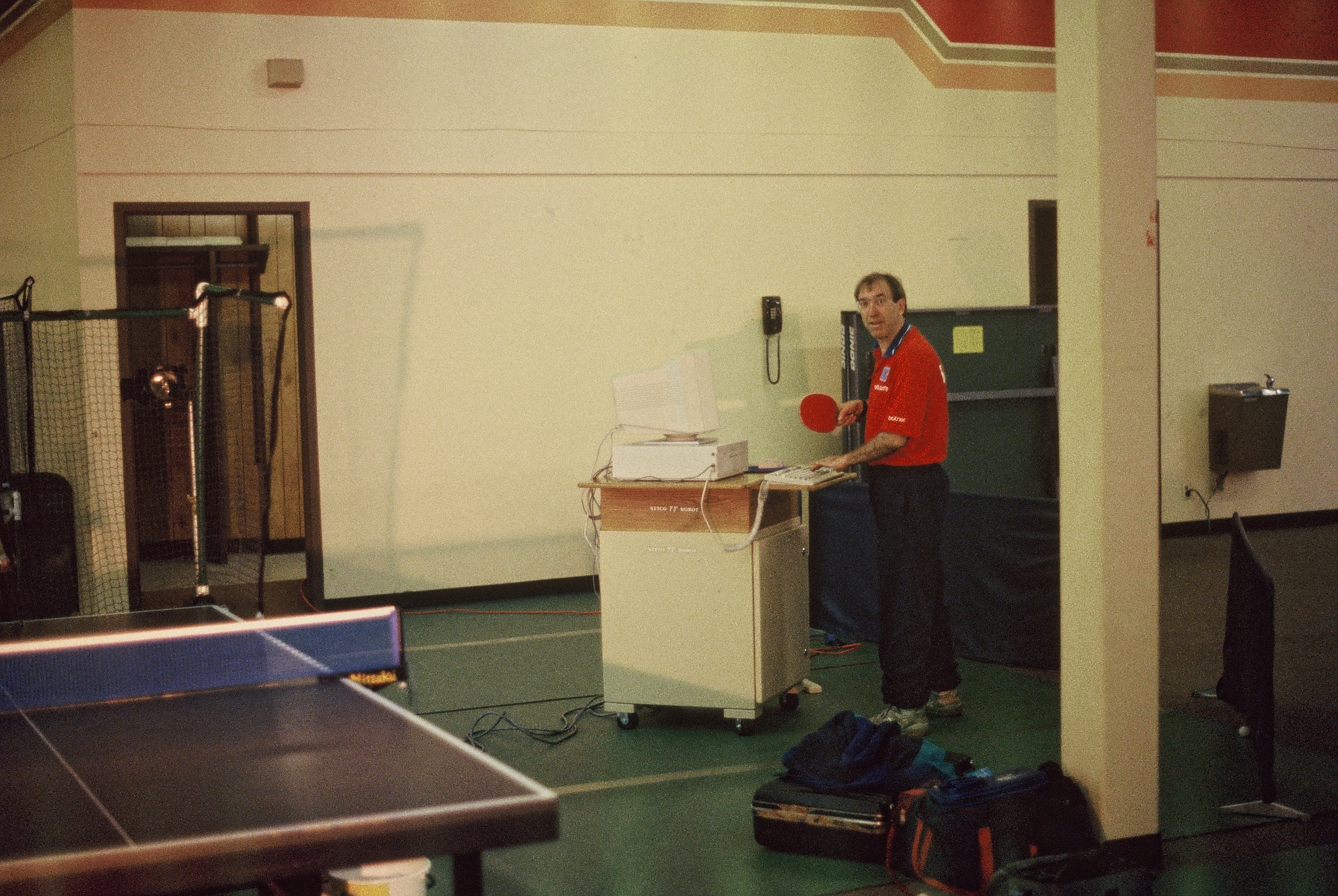
Финальная версия робота для настольного тенниса была доставлена на олимпийскую базу в Вирджинии 16 июня 1992 года. Разработчики не держали свое творение в секрете — робот успешно использовался как для тренировок игроков в олимпийской деревне во Флориде, так и на многочисленных выставках в штате Вирджиния.
Репортажи, посвященные этому чуду техники, показывали по региональному и национальному телевидению США, о нем упоминали во всех крупных газетах Восточного побережья страны. Кроме того, вышли статьи в таких именитых журналах, как Time, Omni и Sports Illustrated.
Вакиди разрешил нам опубликовать эти видео на нашем Youtube канале, и мы собрали их для вас в один ролик:
Ну ведь классный робот, да?!
По ощущениям самого разработчика, практически все поставленные цели проекта были достигнуты. И даже несмотря на то, что робот был доступен для тренировок спортсменов лишь короткий промежуток времени до Олимпийских игр в Барселоне, он существенно помог в подготовке команды.

В частности, для подготовки к игре против Ю Нам-Гю из Южной Кореи (золотой призер Олимпийских игр 1988 года) была разработана сложная последовательность подач свойственных противнику. В последствии, Шон О’Нил (позже стал директором USATT — ассоциации настольного тенниса в США ), чуть не победил Ю Нам-Гю на играх 92-го года. Сейчас сам Шон объясняет свою сильную игру как раз таки интенсивными тренировками с роботом по этой комбинации.
Несмотря на то, что первые попытки создать программируемого робота для настольного тенниса были предприняты еще в начале 90-х, усовершенствования продвигались медленными темпами. Усилия большинства компаний на рынке были сосредоточены, прежде всего, на увеличении надежности при одновременном снижении затрат и веса (робот 1992 года, вместе со всем оборудованием, весил более 300 кг), а позже на обеспечении беспроводного управления. Мы в TenniRobo готовы переломить ситуацию, принять эстафету у первых изобретателей, и совершить новый прорыв…
 |
Информацию любезно предоставил Вакиди Фаликофф — предприниматель, профессор и изобретатель. Был руководителем на многих проектах, в том числе с участием около 500 человек. Как изобретатель и автор/соавтор, он имеет 39 выданных в США патентов в области твердотельного освещения, солнечной энергии и оптики, и 2 патента в области химии. |